Can we translate a rough sense for what to do + VLA prior into successful behavior?
Can we translate a rough sense for what to do + VLA prior into successful behavior?
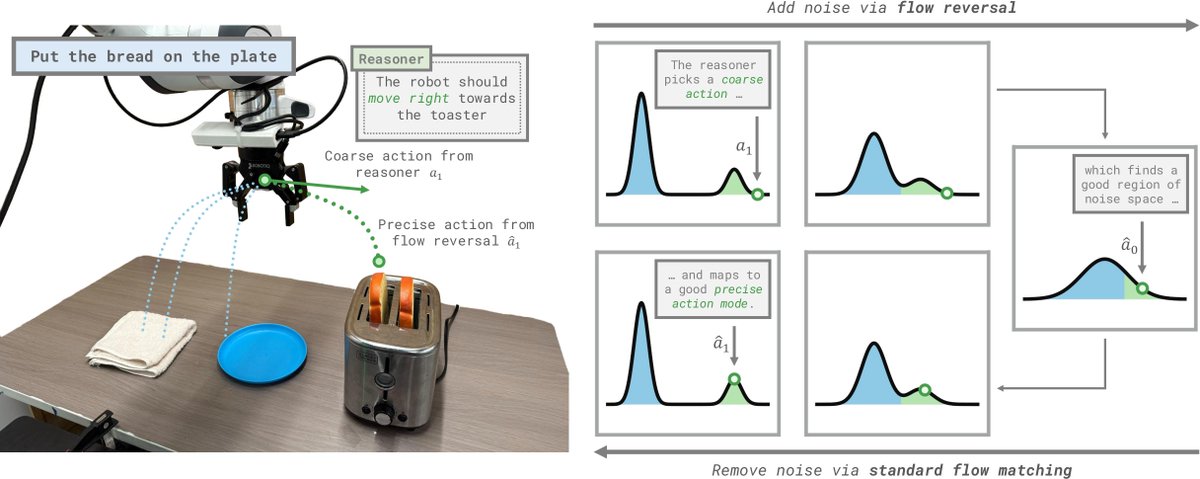
Flow reversal steering:
- runs the VLA’s flow ODE backwards to back out noise that’s closest to coarse traj
- runs flow forwards to get closest good behavior
Paper: https://t.co/FUDqDEpeJq
@tangerinecoder: Generalist robot policies learn many useful skills, but struggle to select good behaviors for new tasks. To solve this, we introduce Flow Reversal Steering (FRS), a method to refine coarse semantic guidance into precise, in-distribution motions. https://t.co/uCR6KmoDo8

Write a comment